- Published on
Finding the Shortest Path from A to Anywhere

In this post, I would like to take a slightly different approach and write about an algorithm that I learned about in a classroom setting. While taking a computer science course in data structures and algorithms this quarter, I found the graph data structure and related algorithms to be particularly fascinating, as graphs can be applied in real-life to represent virtually anything from friendships to geographic maps. Although far from being an expert on this topic, I am going to make an attempt to dissect perhaps the most famous graph algorithm and its practical application. Take a bow, introducing Dijkstra's algorithm and the single source shortest path problem.
1. Single Source Shortest Path
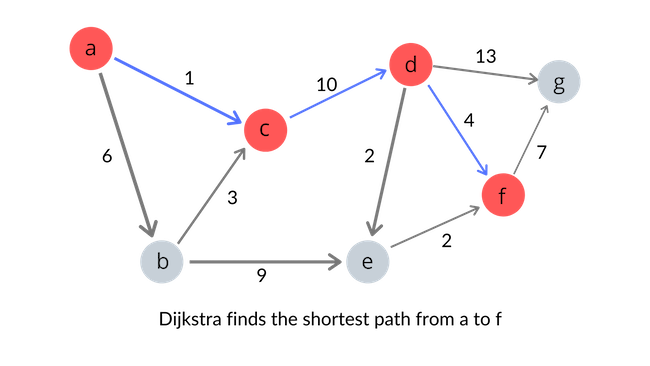
Before we talk about the algorithm itself, let's first get a sense of what Dijkstra's algorithm is all about; what significant questions can Dijkstra's famous algorithm answer? Often referred to as the "Single source shortest path" problem, Dijkstra's algorithm is suitable for finding the shortest distance from a single vertex to all other vertices. Using the results Dijkstra's algorithm produces, we can also find the shortest path from a single vertex to a specific destination, say, vertex f.

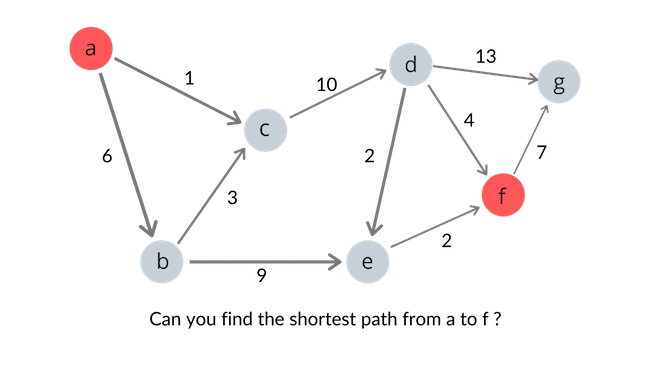
The graph illustrated above might have you think "It doesn't seem that hard to manually find the shortest path from vertex a to f !" If that's the case, imagine a graph with hundreds of vertices and edges; would you still be willing to manually find the shortest path from a to f ? It would be possible, but extremely time-consuming. This is where Dijkstra's algorithm comes into play. With some help from Dijkstra, we can find the shortest path from a single vertex to every other reachable vertex in the graph, with relative ease.
2. Dijkstra's Algorithm
Finally, we can start our dissection of Dijkstra's algorithm. If we simply try to memorize the code for the algorithm line by line, it will be difficult (at least for people with non-photographic memory, like me). The better approach would be to try and understand what repeated steps the algorithm goes through until it finishes processing the graph and returns. The following are the steps that Dijkstra's algorithm follows, until it exhausts the entire vertex set of a graph:
When selecting the next node to visit, decision should be made based on the known distance
For each node we visit, we check the neighboring nodes (i.e. the nodes that are 1 edge away from the node we are currently visiting)
When checking the neighboring nodes, calculate the distance traveled so far (distance from the starting node to the current node) + distance to the neighboring node from the current node
If the calculation done above is less than the known distance to the neighboring node, update the distance information for that neighboring node
(Note: Steps 3 - 4 are known as the relaxation of vertices)
In the implementation of the algorithm, I will be using Python's heapq module, which conveniently lets us use a priority queue to ensure that the nodes are relaxed in the correct order (minimum distance nodes first!). Also, note that I will be using an adjacency list representation of graphs, implemented with Python's dictionary. With the steps specified above in mind, let's take a look at the following implementaion of Dijkstra's algorithm:
#python implementation of Dijkstra's algorithm using priority queue
import heapq
def dijkstra(graph, source):
dist = { vertex: float("inf") for vertex in graph }
pred = { vertex: -1 for vertex in graph }
visited = { vertex: False for vertex in graph }
dist[source] = 0
pred[source] = source
todo = [(0, source)]
#repeat the process until nodes are exhausted
while len(todo) > 0:
#select the node with minimum known distance
curr_distance, curr_vertex = heapq.heappop(todo)
#if vertex has already been visited, skip it
if visited[curr_vertex]: continue
#if vertex has not been visited do the follwing
visited[curr_vertex] = True
#check the neighbors of the current node
for neighbor, weight in graph[curr_vertex].items():
#update if following condition is satisfied
if curr_distance + weight < dist[neighbor]:
dist[neighbor] = curr_distance + weight
#keep track of previous node : we need it to find shortest path
pred[neighbor] = curr_vertex
heapq.heappush(todo, (curr_distance + weight, neighbor))
#result packages dist and pred in a tuple
return (pred, dist)
Dijkstra's algorithm implemented as above does not directly give us the shortest path between two vertices. However, it does produce two valuable pieces of information, one of which can be carefully crafted to give us the shortest path between two vertices. Notice how the dijkstra function above returns a tuple containing pred and dist. The pred dictionary contains information on what node was visited before visiting each of the vertices while traversing the graph. The dist dictionary contains information on the distance from the starting point to each of the vertices in the graph. By working our way backwards in the pred dictionary, starting from the destination until we reach the starting point, it is possible to identify the shortest path from the source to destination. We will need the help of a stack to get the order correct.
def shortest_path(graph, source, destination):
#retrieve the pred dictionary from dijkstra
pred = dijkstra(graph, source)[0]
#we need a stack to reverse the order
stack = [destination]
#we will return the shortest path as a list
shortest_path = []
while True:
curr = stack[-1]
before = pred[curr]
#source and destination are disconnected
if before == -1:
return "there is no path!"
#we have reached the source node by traversing backwards
if before == source:
stack.append(before)
break
stack.append(before)
#reverse the order: source --> destination
while stack:
shortest_path.append(stack.pop())
return shortest_path
#example graph to test dijkstra's algorithm
example_graph = {
'a': {'b': 6, 'c': 1},
'b': {'c': 3, 'e': 9},
'c': {'d': 10},
'd': {'e': 2, 'f': 4, 'g': 13},
'e': {'f': 2},
'f': {'g': 7},
'g': {}
}
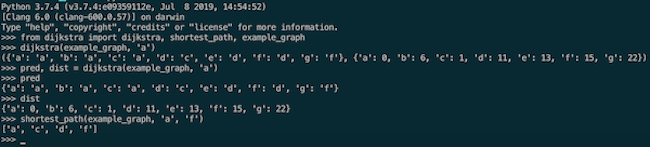
With the shortest_path function, we can now find the shortest path from a source node to a destination node. Note that Dijkstra's algorithm is not capable of finding the distance/shortest path between two nodes that are not connected.
The following is the result of running dijkstra and shortest_path functions inside my Python shell with the example graph provided above. Note that the example_graph provided in the code is an adjacency list representation of the graph shown above, but is implemented with a Python dictionary.

3. Limitations of Dijkstra's Algorithm
The Dijkstra's algorithm is not bullet proof, however. The most remarkable limitation of Dijkstra's algorithm is that it will not work as expected if there are negative edges in a graph. In order to find the shortest distance from one starting vertex to all connected vertices, Dijkstra relies on the fact that if all edges are non-negative, it is always true that adding an edge will never make a path shorter. Only when such an assumption can safely be made can Dijkstra's "greedy" approach to the problem remain intact with solving global optimality. If negative edges are introduced and such an assumption is no longer valid, Dijkstra's method of selecting a node with minimum known distance at each iteration will no longer guarantee a correct outcome. To overcome such limitations of Dijkstra's algorithm, we can use other algorithms such as the Bellman-Ford's algorithm and the Floyd-Warshall's algorithm, as needed. These may be subject to discussion in future posts.
4. Conclusion
Hopefully this blog post helped you gain a solid understanding of Dijkstra's algorithm and the single source shortest path problem. If there is anyone reading this post who is interested in learning the mathematical proof on the correctness of Dijkstra's famous algorithm, I found this helpful.

